Cube Flight Controller
The Cube flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems. It is based on the Pixhawk-project FMUv3 open hardware design and runs PX4 on the NuttX OS.
The controller is designed to be used with a domain-specific carrier board in order to reduce the wiring, improve reliability, and ease of assembly. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs form the frame of the vehicle.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / Backup.
Quick Summary
- 32bit STM32F427 Cortex® M4 core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash (fully accessible)
- 32 bit STM32F103 failsafe co-processor
Purchase
- The Cube (ProfiCNC)
Assembly
Build Firmware
make px4fmu-v3_default upload
Pinouts and Schematics
The board is documented in detailed on the The Cube Project website.
The datasheet from Hex manufacturing can be found here.
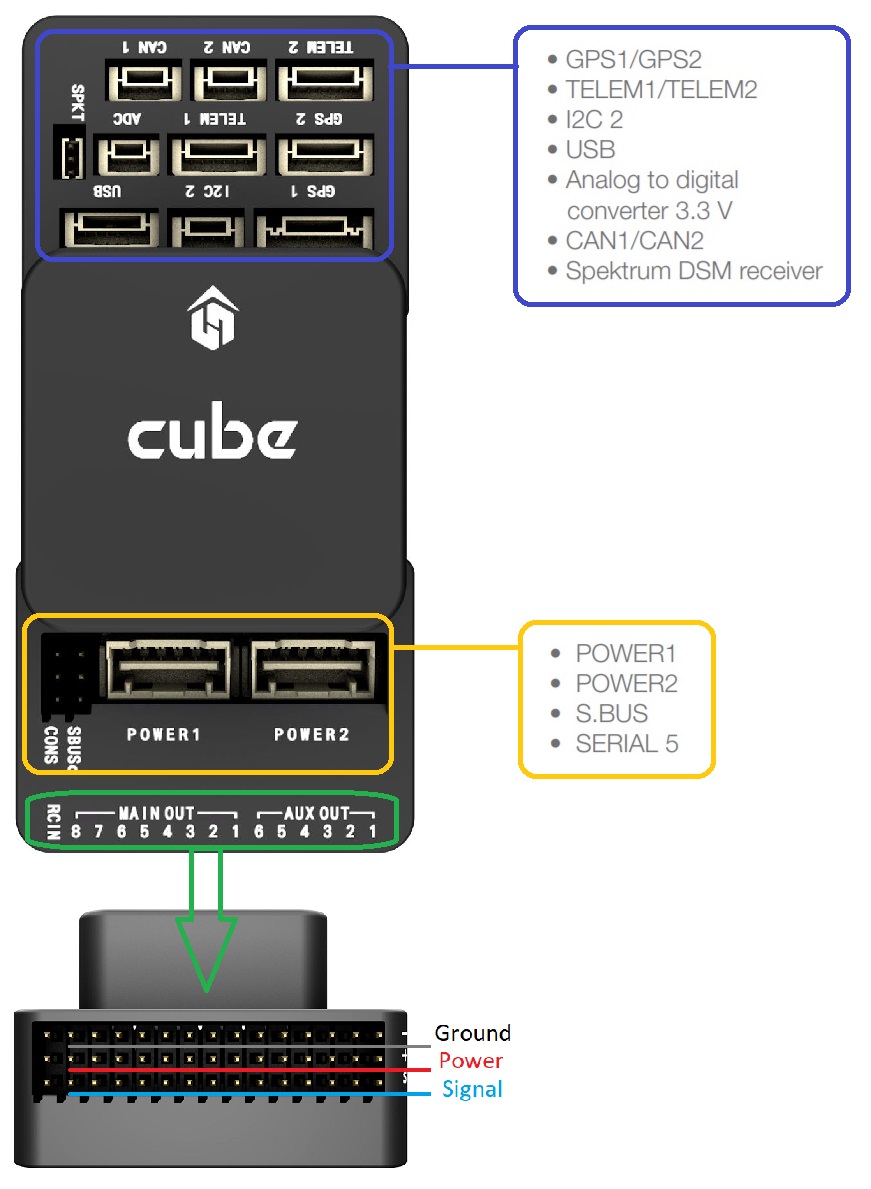
Ports
Top-Side (GPS, TELEM etc)
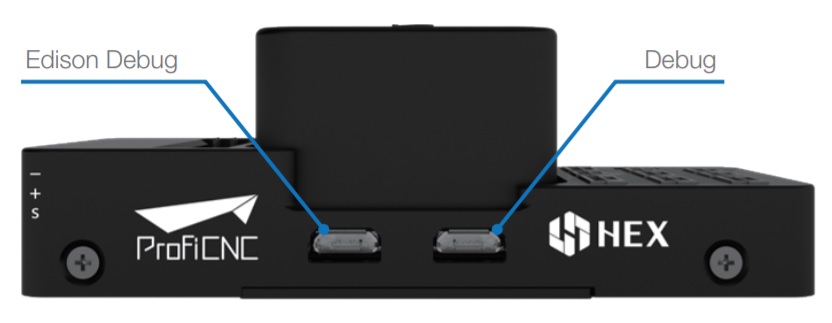
Debug Ports
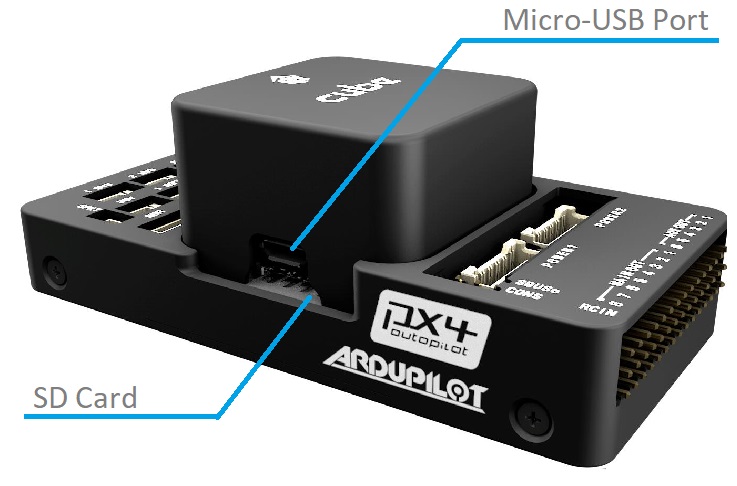
USB/SDCard Ports
Issues
CAN1 and CAN2 silk screen on the Pixhawk 2.1 are flipped (CAN1 is CAN2 and vice versa).