Pixhack v5
Pixhack v5® is an advanced autopilot designed and made by CUAV®. The board is based on the Pixhawk-project FMUv5 open hardware design. It runs PX4 on the NuttX OS, and is fully compatible with PX4 firmware. It is intended primarily for academic and commercial developers.

Quick Summary
- Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
On-board sensors:
- Accelerometer/Gyroscope: ICM-20689
- Accelerometer/Gyroscope: BMI055
- Magnetometer: IST8310
- Barometer: MS5611
Interfaces:
- 8-14 PWM outputs (6 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for ppm/DSM and S.Bus
- analog / PWM RSSI input
- S.Bus servo output
- 5 general purpose serial ports
- 4 I2C ports
- 4 SPI buses
- 2 CANBuses with serial ESC
- Analog inputs for voltage / current of 2 batteries
- Power System:
- Power: 4.3~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 90g
- Dimensions: 44x84x12mm
- Other Characteristics:
- Operating temperature: -20 ~ 80°C (Measured value)
Purchase
Order from CUAV.
Connection
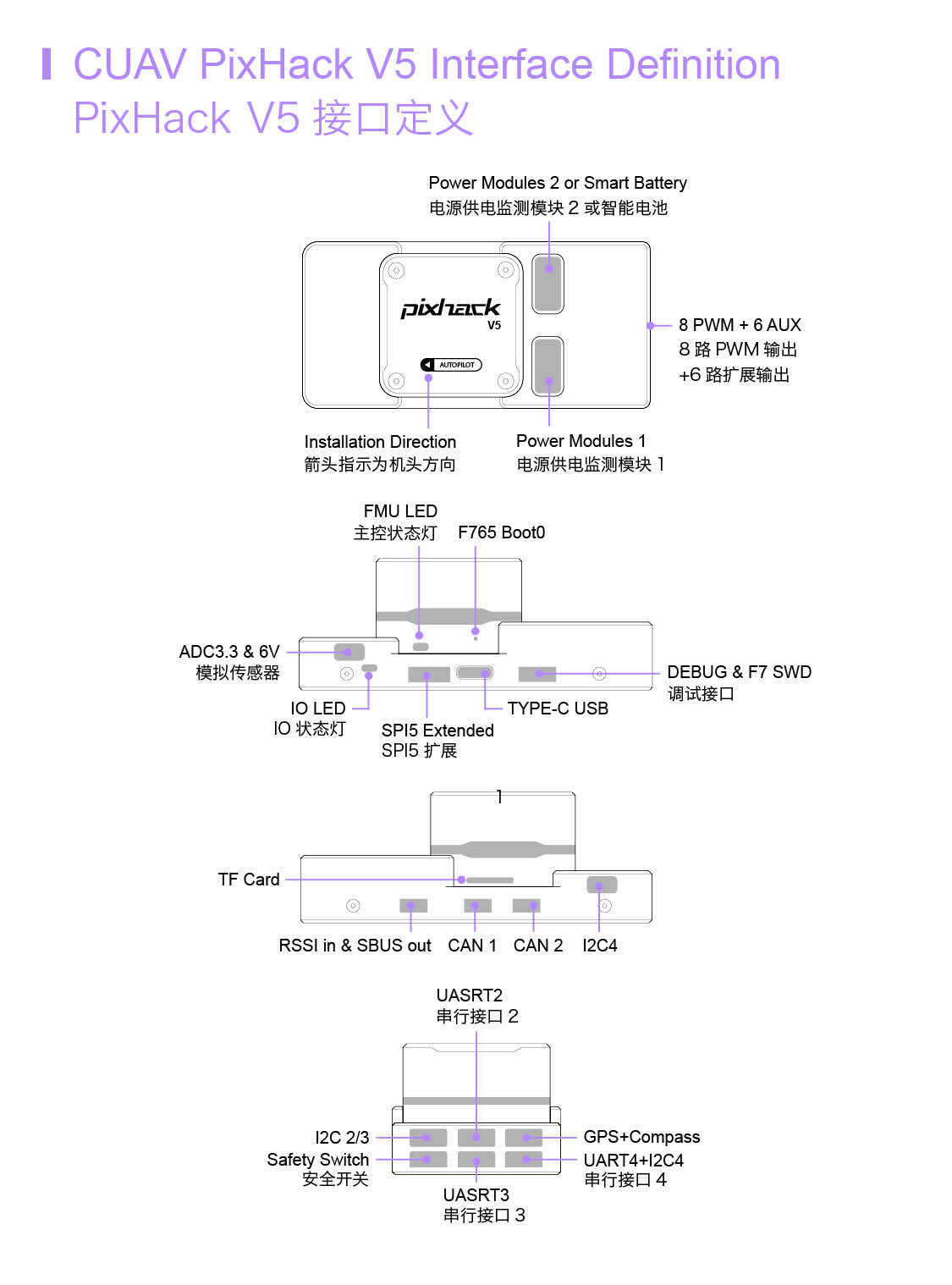
The RCIN interface is limited to powering the rc receiver and cannot be connected to any power/load.
Voltage Ratings
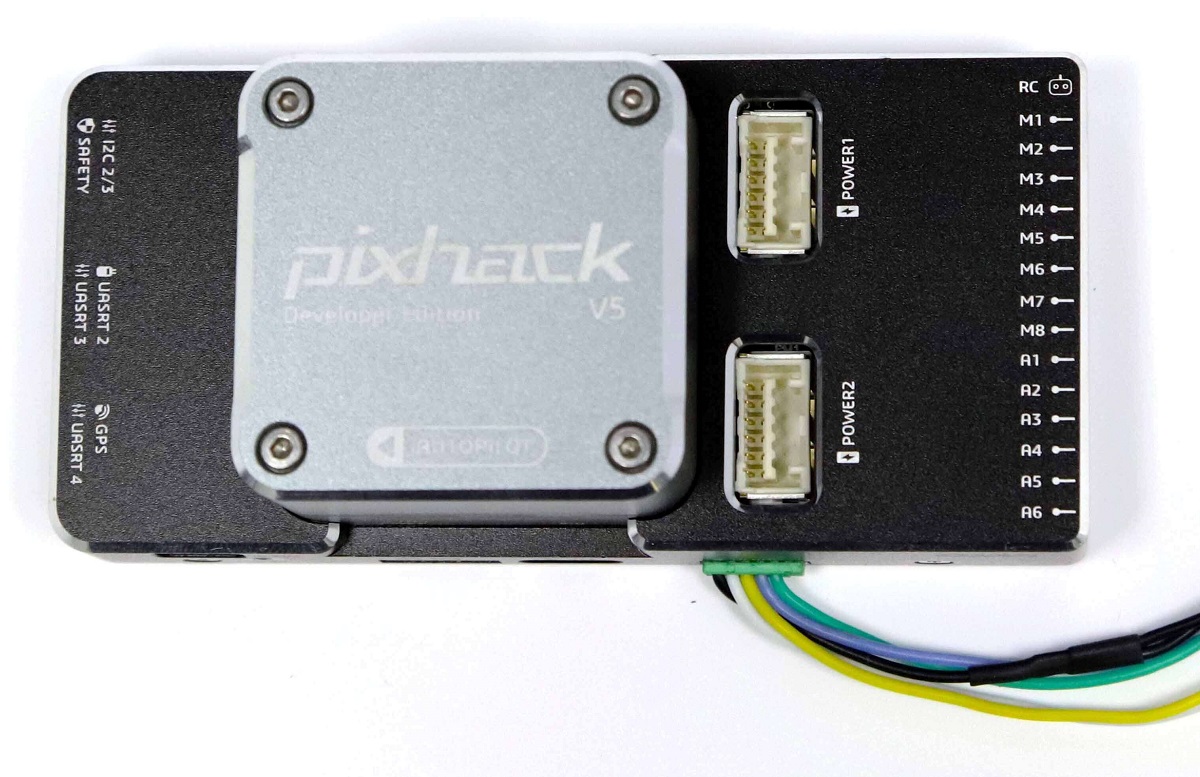
Pixhack v5 can be triple-redundant on the power supply if three power sources are supplied. The three power rails are: POWER1, POWER2 and USB.
The output power rails FMU PWM OUT and I/O PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWER1, POWER2 or USB or the board will be unpowered.
Normal Operation Maximum Ratings
Under these conditions all power sources will be used in this order to power the system:
- POWER1 and POWER2 inputs (4.3V to 5.4V)
- USB input (4.75V to 5.25V)
Building Firmware
make px4fmu-v5_default upload
Debug Port
The system's serial console and SWD interface operate on the FMU Debug port. Simply connect the FTDI cable to the Debug & F7 SWD connector. To access the I/O Debug port, the user must remove the Pixhack v5 shell. Both ports have standard serial pins and can be connected to a standard FTDI cable (3.3V, but 5V tolerant).
The pinout is as shown.
| pin | pixhack v5 debug |
|---|---|
| 1 | GND |
| 2 | FMU-SWCLK |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
Peripherals
Supported Platforms / Airframes
Any multicopter / airplane / rover or boat that can be controlled with normal RC servos or Futaba S-Bus servos. The complete set of supported configurations can be seen in the Airframes Reference.