Flight Controller/Sensor Orientation
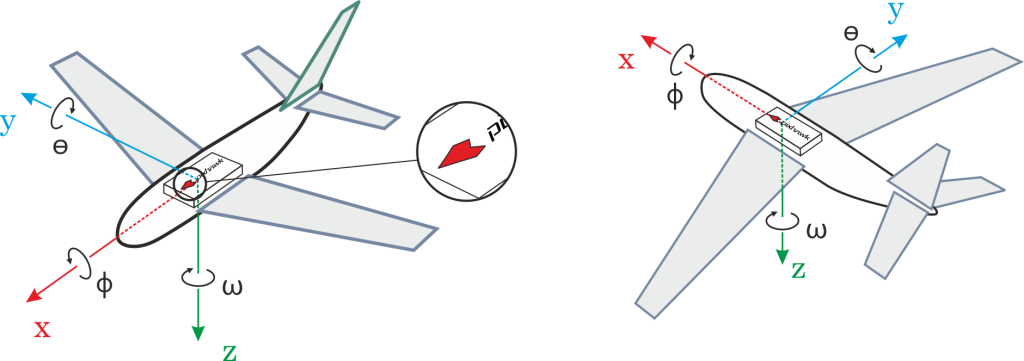
By default the flight controller (and external compass(es), if present) should be placed on the frame top-side up, oriented so that the arrow points towards the front of the vehicle. If the board or an external compass are mounted in any other orientation then you will need configure this in the firmware.
Calculating Orientation
YAW, PITCH and/or ROLL offsets are calculated relative to the default forward-facing-upright orientation (clock-wise rotation around the Z, Y and X axis, respectively). The default orientation is referred to as ROTATION_NONE.
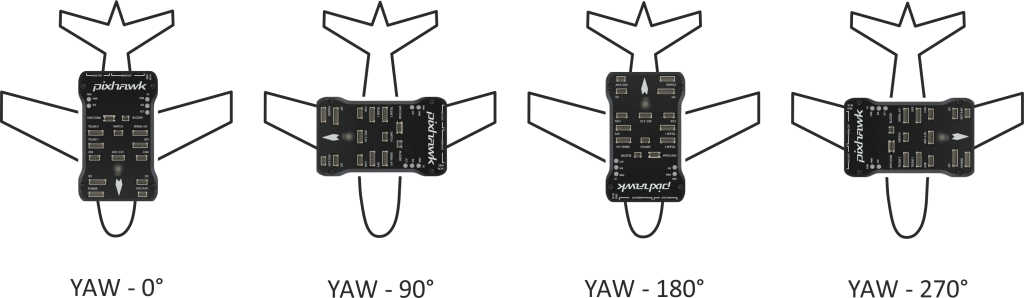
For example, the vehicles shown below have rotations around the x-axis (only) corresponding to: ROTATION_NONE, ROTATION_YAW_90,ROTATION_YAW_180,ROTATION_YAW_270.
Setting the Orientation
To set the orientations:
- Start QGroundControl and connect the vehicle.
- Select the Gear icon (Vehicle Setup) in the top toolbar and then Sensors in the sidebar.
- Select the Set Orientations button.
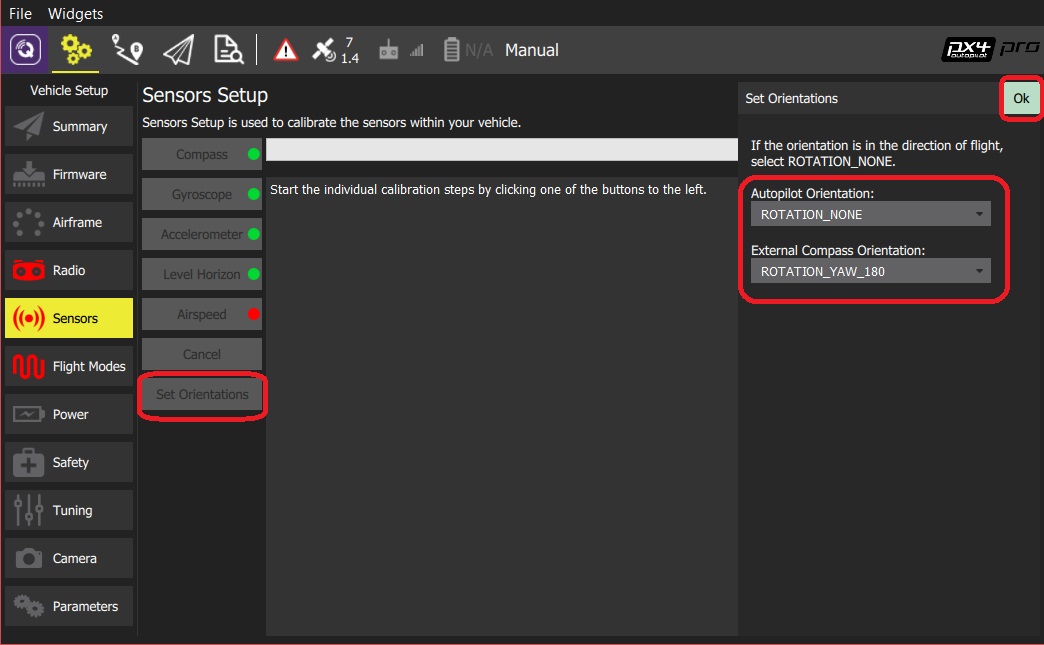
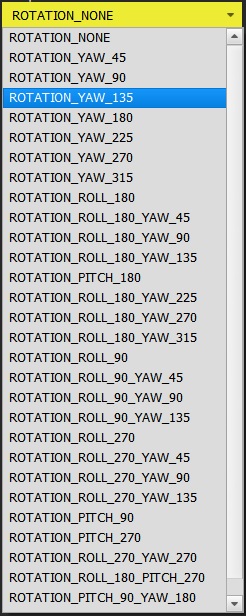
Select the AutoPilot Orientation (as calculated above).
- Select the External Compass Orientation in the same way (this option will only be displayed if your vehicle has an external compass).
- Press OK.
Fine Tuning
You can use Level Horizon Calibration to compensate for small miss-alignments in controller orientation and to level the horizon in flight view.
Further Information
- Advanced Orientation Tuning (advanced users only).
- QGroundControl User Guide > Sensors