Gazebo 시뮬레이션
Gazebo는 자동 로못을 위한 3D 시뮬레이션 환경입니다. ROS없이 독립적으로 사용하거나 SITL + ROS를 지원합니다.
설치
Gazebo와 시뮬레이션 플러그인 설치가 필요합니다.
Gazebo 버전 7을 추천합니다.(최소 Gazebo 6 버전) Linux을 실행하고 Jade보다 이전 ROS 버전이 설치되어 있다면 예전 버전인 번들 Gazebo를 언인스톨해야 합니다.(sudo apt-get remove ros-indigo-gazebo)
ROS 사용자
PX4 SITL은 Gazebo 시뮬레이터를 사용하며 ROS에 의존하지 않습니다. 시뮬레이션은 ROS로 인터페이스될 수 있고 동일한 방식으로 일반 flight 코드에도 적용될 수 있습니다.
PX4를 ROS와 사용할려고 한다면, 다음 ROS를 위한 Gazebo 버전 7 가이드를 참고하세요.
일반 설치
Gazebo 7용 Linux 설치 방법을 참고하세요.
모두 설치되었는지 확인 : gazebo7 and libgazebo7-dev.
시뮬레이션 실행
PX4 펌웨어의 소스 디렉토리내에서 airframe 중에 하나로(Quads, planes, VTOL을 지원하며 optical flow 포함) PX4 SITL을 실행합니다 :
Gazebo 실행을 유지하면서 PX4를 재실행하려면 아래와 같이 합니다.
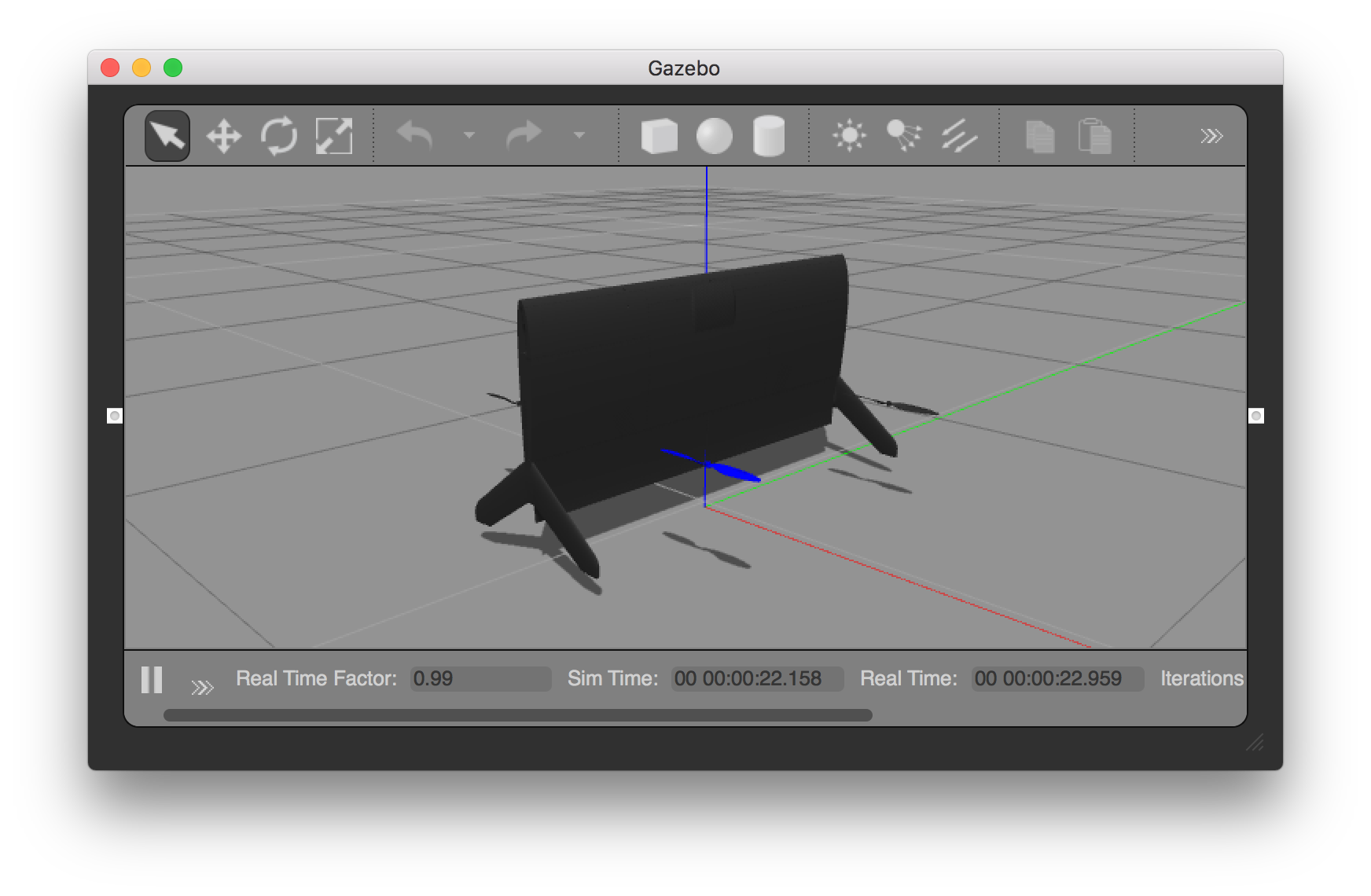
Quadrotor
cd ~/src/Firmware
make posix_sitl_default gazebo
Quadrotor with Optical Flow
make posix gazebo_iris_opt_flow
3DR Solo
make posix gazebo_solo

표준 Plane
make posix gazebo_plane

표준 VTOL
make posix_sitl_default gazebo_standard_vtol

Tailsitter VTOL
make posix_sitl_default gazebo_tailsitter
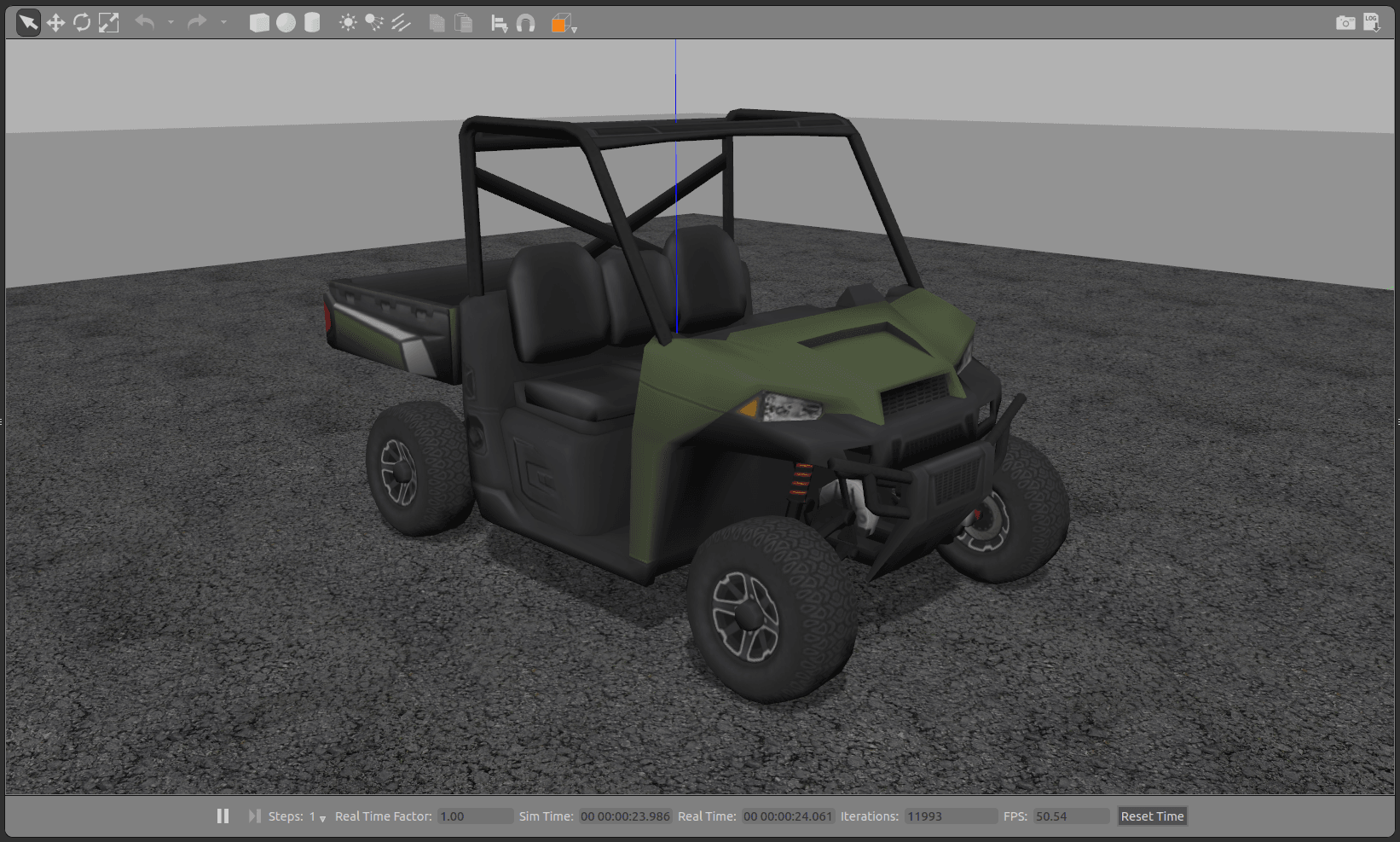
Ackerman vehicle (UGV/Rover)
make posix gazebo_rover
World 바꾸기
현재 기본 world는 iris.wold로 worlds 디렉토리에 있습니다. iris.world에 기본 환경에서 ground로 heightmap을 사용합니다. 이 ground로는 거리 센서 사용이 어렵습니다. heightmap으로 예상치 못한 결과가 나오면 iris.model에 있는 uneven_ground를 asphalt_plane으로 model을 변경하는 것을 추천합니다.
하늘로 날리기
에러가 발생하면 파일과 코드 설치 가이드를 참고하세요.
PX4 쉘이 나타납니다:
[init] shell id: 140735313310464
[init] task name: px4
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
pxh>
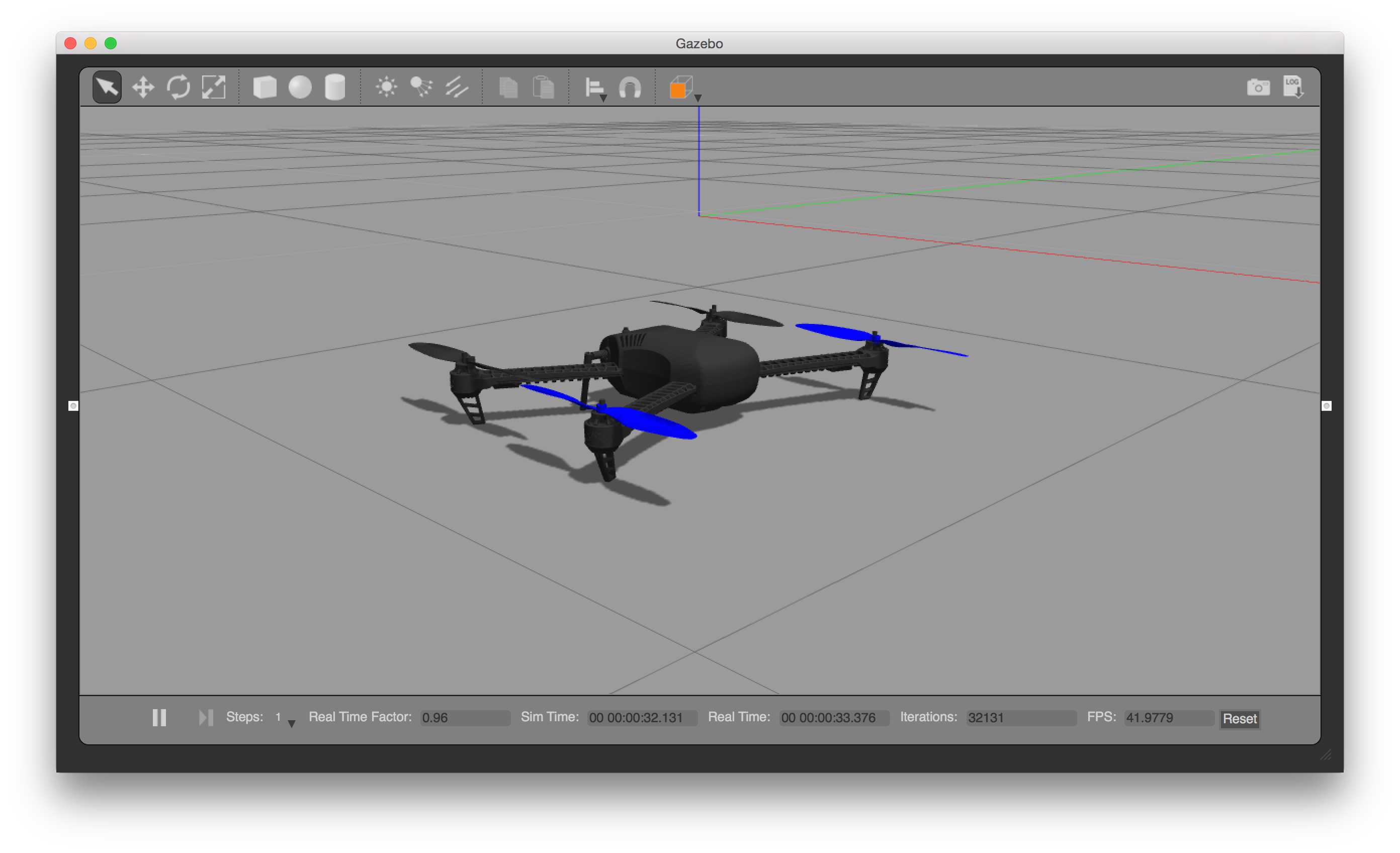
쿼드로터 모델을 오른쪽 클릭하면 콘텍스트 메뉴에서 팔로우 모드를 활성화시킬 수 있습니다. Right-clicking the quadrotor model allows to enable follow mode from the context menu, which is handy to keep it in view.
시스템은 일단 초기화를 마치면 home position을 출력합니다. (telem> home: 55.7533950, 37.6254270, -0.00) 다음을 입력해서 공중으로 띄웁니다 :
pxh> commander takeoff
조이스틱 지원은 QGroundControl(QGC)를 통해서 가능합니다. 수동 입력을 사용하기 위해서는 메뉴얼 비행 모드로(POSCTL, position control) 시스템을 둡니다. QGC preferences 메뉴에서 조이스틱을 활성화시킬 수 있습니다.
커스텀 takeoff 위치 설정
SITL에서 디폴트 takeoff 위치는 환경변수로 바꿀수 있습니다.
설정할 변수는 : PX4_HOME_LAT, PX4_HOME_LON, and PX4_HOME_ALT
예로:
export PX4_HOME_LAT=28.452386
export PX4_HOME_LON=-13.867138
export PX4_HOME_ALT=28.5
make posix gazebo
Gazebo와 PX4를 별도로 구동시키기
확장 개발 세션에 대해서 Gazebo와 PX4를 별도로 혹은 IDE 내부에서 구동시키는 것이 편할 수 있습니다.
px4가 sitl_run.sh 를 실행시키는 기존 cmake 타겟에 추가하는데 여기에 px4가 올바른 모델을 로드하도록 파라미터를 사용합니다. 원래 sitl px4 app의 wrapper 역할을 하는 px_<mode>라는 이름의 launcher 타겟을 생성합니다. 이 wrapper는 단순히 현재 워킹 디렉토리와 모델 파일에 대한 패스와 같이 app 인자를 포함하고 있습니다.
사용 방법
- 터미널을 통해서 gazebo(다른 시뮬레이터) 서버와 클라이언트 뷰어 실행:
make posix_sitl_default gazebo_none_ide - IDE에서 디버깅하기를 원하는
px4_<mode>타겟을 선택 (예로px4_iris) - IDE에서 바로 디버깅 세션을 시작 이 방법은 시뮬레이터가 항상 백그라운드로 동작하기 때문에 사이클 타임을 상당히 줄여주는데 이유는 시뮬레이터는(gazebo) 항상 백그라운드로 실행되고 px4 프로스세가 매우 가벼워서 재실행만 하면 됩니다.
확장과 커스터마이징
시뮬레이션 인터페이스를 확장하고 커스터마이징하기 위해서 Tools/sitl_gazebo 폴더에 있는 파일을 수정합니다. 코드는 Github에 sitl_gazebo repository를 참고하세요.
빌드 시스템은 올바른 GIT 서브모듈과 시뮬레이터가 있어야합니다. 디렉토리에 파일들에 변경 내용을 덮어쓰기는 하지 않습니다.
ROS 인터페이스
시뮬레이션은 실제 비행체와 동일한 방식으로 ROS 인터페이스를 사용합니다.